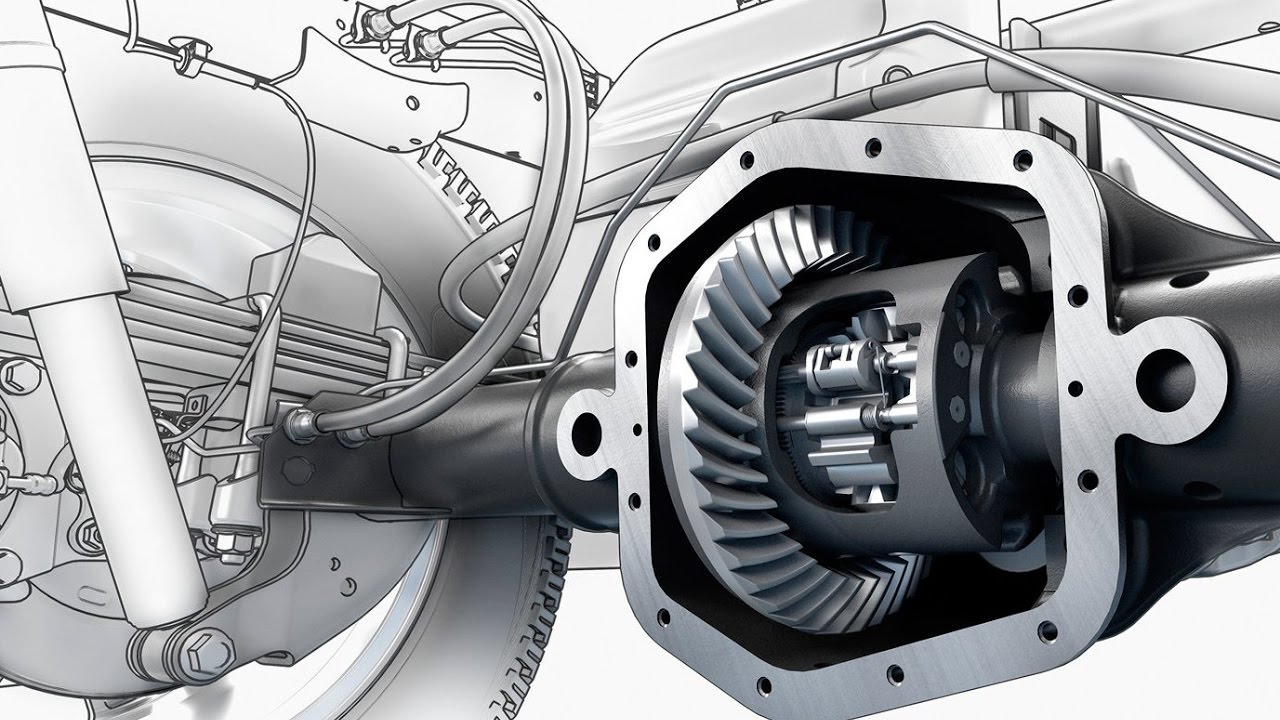
Third Differential - The third derivative of position is called the jerk of the object. It represents the rate of change of acceleration, and is often used in. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation. A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground.
It represents the rate of change of acceleration, and is often used in. A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. The third derivative of position is called the jerk of the object. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation.
It represents the rate of change of acceleration, and is often used in. The third derivative of position is called the jerk of the object. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation. A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground.
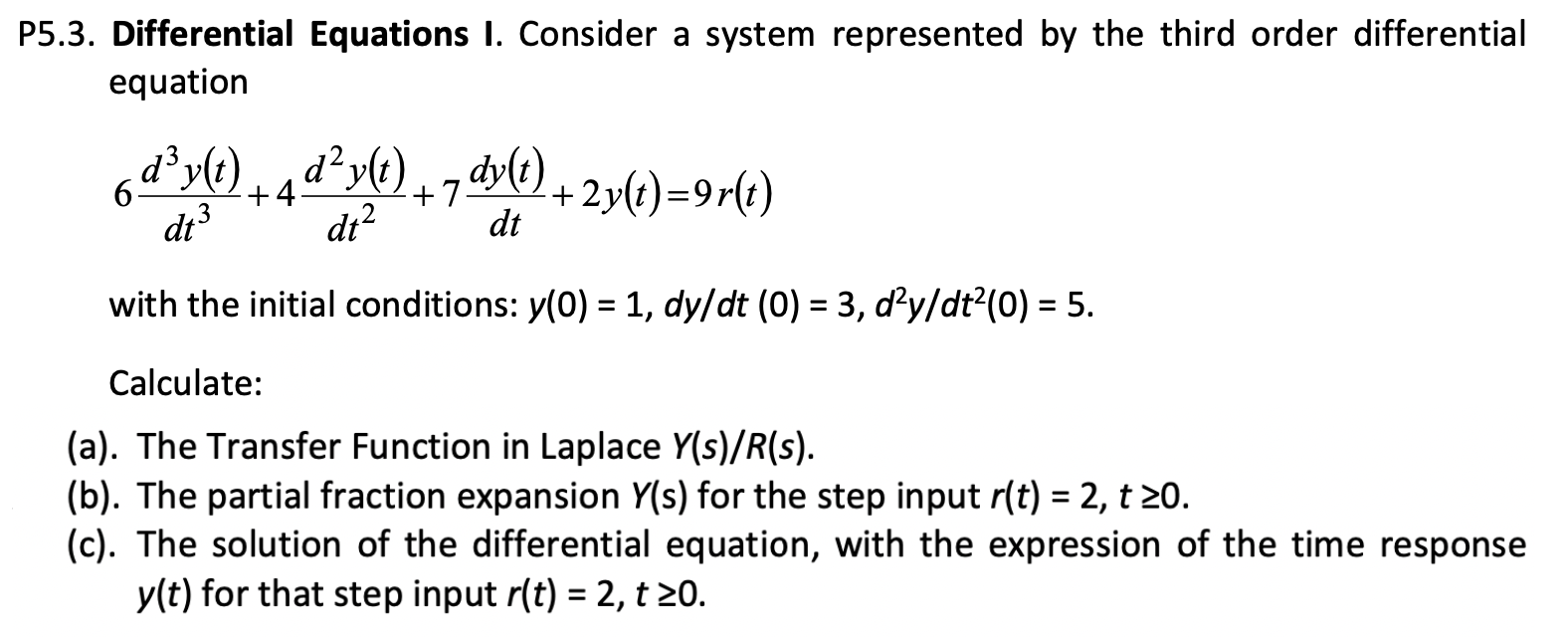
Solved 5.3. Differential Equations I. Consider a system
A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation. It represents the rate of change of acceleration, and is often used in. The third derivative of position is called the jerk of the object.
THE EQUATIONS THIRD DIFFERENTIAL
A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. It represents the rate of change of acceleration, and is often used in. The third derivative of position is called the jerk of the object. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation.

(PDF) EXCHANGED THIRD ORDER DIFFERENTIAL EQUATION ORDINARY
A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. It represents the rate of change of acceleration, and is often used in. The third derivative of position is called the jerk of the object. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation.
How a Car Differential Works? Animation
A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. It represents the rate of change of acceleration, and is often used in. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation. The third derivative of position is called the jerk of the object.
Ford 9 Inch Limited Slip Posi Differential Third Members, Clutch
A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation. It represents the rate of change of acceleration, and is often used in. The third derivative of position is called the jerk of the object.
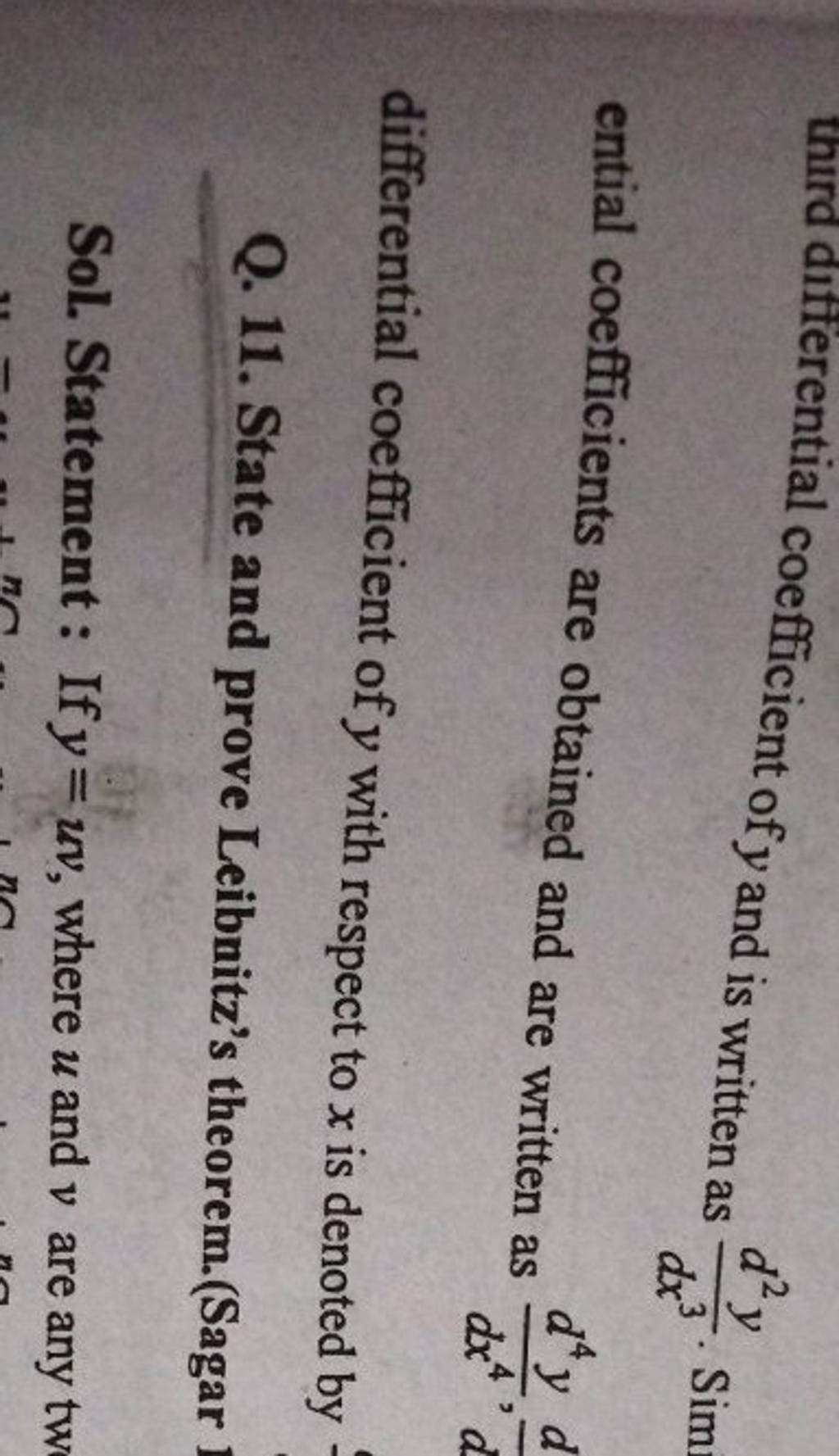
third differential coefficient of y and is written as dx3d2y ⋅Sim ential
The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation. A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. It represents the rate of change of acceleration, and is often used in. The third derivative of position is called the jerk of the object.
Differential Fluid Change Don't This Overlooked Car Maintenance
The third derivative of position is called the jerk of the object. A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. It represents the rate of change of acceleration, and is often used in. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation.

Differential Third Member Assembly 196978 (3.9/1 Ratio)196685
The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation. A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. The third derivative of position is called the jerk of the object. It represents the rate of change of acceleration, and is often used in.

How to Solve the Linear Third Order Differential Equation y''' 6y
The third derivative of position is called the jerk of the object. A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation. It represents the rate of change of acceleration, and is often used in.

(PDF) Some thirdorder differential equations in physics
A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. It represents the rate of change of acceleration, and is often used in. The third derivative of position is called the jerk of the object. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation.
It Represents The Rate Of Change Of Acceleration, And Is Often Used In.
The third derivative of position is called the jerk of the object. A third differential divides the torque input equally between the axles and has the disadvantage on slippery, uneven ground. The presence of parenthesis in the exponent denotes differentiation while the absence of parenthesis denotes exponentiation.