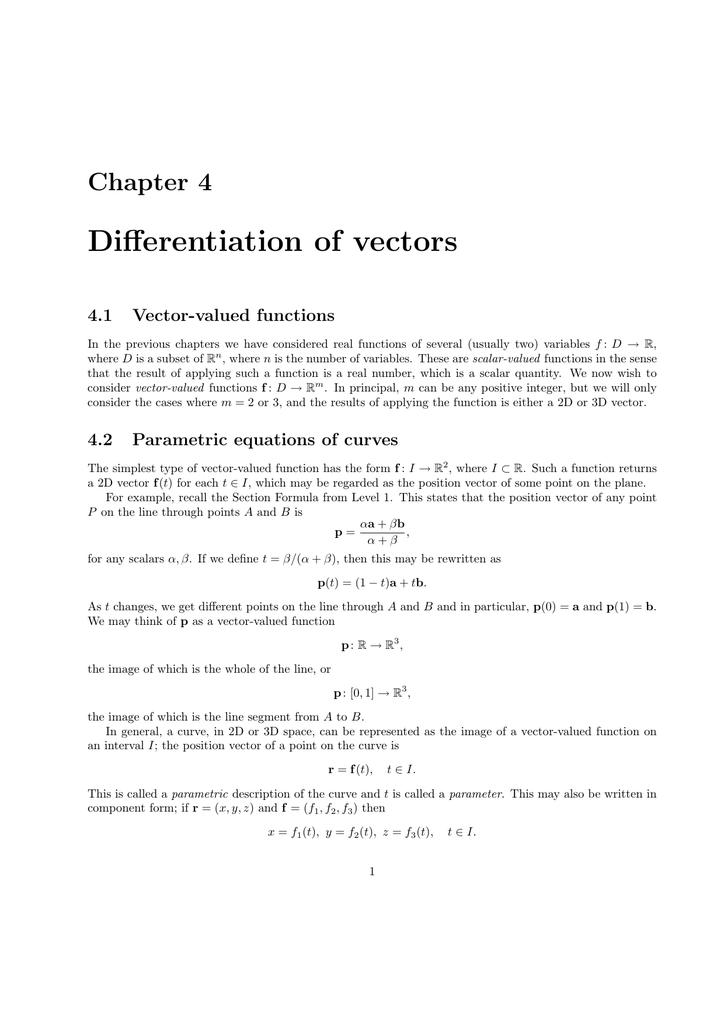
Differentiation Of Unit Vector - Find a unit vector ~uthat lies tangent to graph of # r (t) = 1 + t3;te t;sin(2t) at the point (1;0;0). A reference frame is a perspective from which a. In the previous example, we saw that a vector tangent. Kinematics is all about reference frames, vectors, differentiation, constraints and coordinates. Let $f(t)$ be a vector valued function, then its magnitude is given by $||f(t)||$, and $f(t)$ is a differentiable curve such that $f(t) ≠ 0$ for all.
Let $f(t)$ be a vector valued function, then its magnitude is given by $||f(t)||$, and $f(t)$ is a differentiable curve such that $f(t) ≠ 0$ for all. A reference frame is a perspective from which a. Find a unit vector ~uthat lies tangent to graph of # r (t) = 1 + t3;te t;sin(2t) at the point (1;0;0). In the previous example, we saw that a vector tangent. Kinematics is all about reference frames, vectors, differentiation, constraints and coordinates.
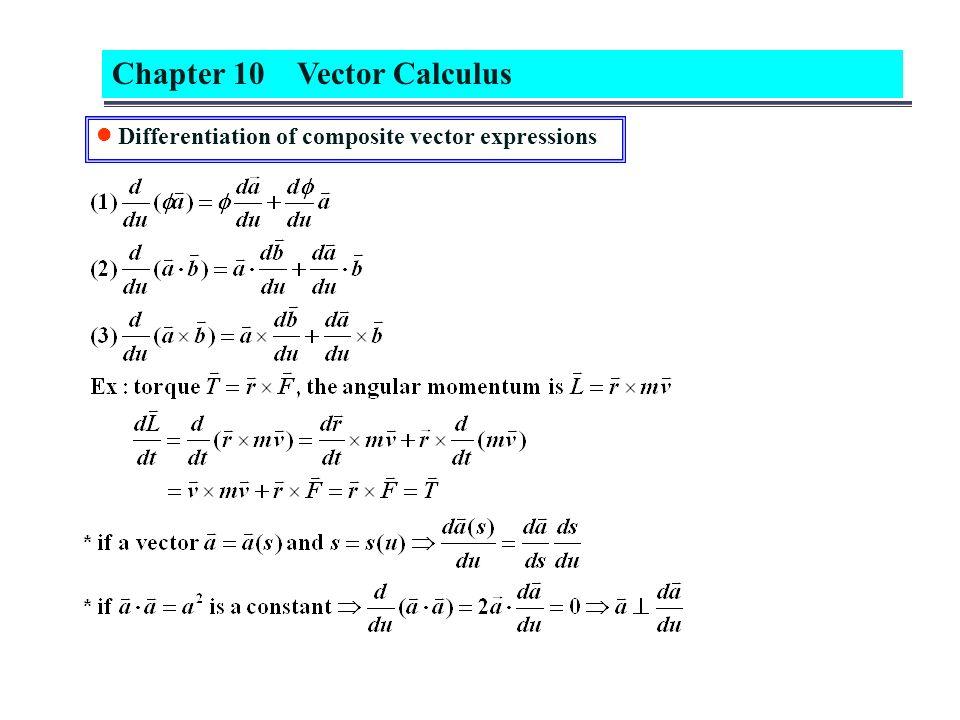
Kinematics is all about reference frames, vectors, differentiation, constraints and coordinates. Let $f(t)$ be a vector valued function, then its magnitude is given by $||f(t)||$, and $f(t)$ is a differentiable curve such that $f(t) ≠ 0$ for all. Find a unit vector ~uthat lies tangent to graph of # r (t) = 1 + t3;te t;sin(2t) at the point (1;0;0). In the previous example, we saw that a vector tangent. A reference frame is a perspective from which a.
Vector Differentiation at Collection of Vector
Find a unit vector ~uthat lies tangent to graph of # r (t) = 1 + t3;te t;sin(2t) at the point (1;0;0). In the previous example, we saw that a vector tangent. Kinematics is all about reference frames, vectors, differentiation, constraints and coordinates. A reference frame is a perspective from which a. Let $f(t)$ be a vector valued function, then.
Vector Differentiation at Collection of Vector
Find a unit vector ~uthat lies tangent to graph of # r (t) = 1 + t3;te t;sin(2t) at the point (1;0;0). Let $f(t)$ be a vector valued function, then its magnitude is given by $||f(t)||$, and $f(t)$ is a differentiable curve such that $f(t) ≠ 0$ for all. In the previous example, we saw that a vector tangent. A.
Vector Differentiation at Collection of Vector
Kinematics is all about reference frames, vectors, differentiation, constraints and coordinates. A reference frame is a perspective from which a. Find a unit vector ~uthat lies tangent to graph of # r (t) = 1 + t3;te t;sin(2t) at the point (1;0;0). In the previous example, we saw that a vector tangent. Let $f(t)$ be a vector valued function, then.

Vector Differentiation at Collection of Vector
Kinematics is all about reference frames, vectors, differentiation, constraints and coordinates. A reference frame is a perspective from which a. Let $f(t)$ be a vector valued function, then its magnitude is given by $||f(t)||$, and $f(t)$ is a differentiable curve such that $f(t) ≠ 0$ for all. In the previous example, we saw that a vector tangent. Find a unit.
Vector Differentiation at Collection of Vector
In the previous example, we saw that a vector tangent. Find a unit vector ~uthat lies tangent to graph of # r (t) = 1 + t3;te t;sin(2t) at the point (1;0;0). A reference frame is a perspective from which a. Let $f(t)$ be a vector valued function, then its magnitude is given by $||f(t)||$, and $f(t)$ is a differentiable.
Vector Differentiation at Collection of Vector
Kinematics is all about reference frames, vectors, differentiation, constraints and coordinates. Let $f(t)$ be a vector valued function, then its magnitude is given by $||f(t)||$, and $f(t)$ is a differentiable curve such that $f(t) ≠ 0$ for all. Find a unit vector ~uthat lies tangent to graph of # r (t) = 1 + t3;te t;sin(2t) at the point (1;0;0)..

Unit 4 Vector Differentiation PDF
In the previous example, we saw that a vector tangent. A reference frame is a perspective from which a. Kinematics is all about reference frames, vectors, differentiation, constraints and coordinates. Find a unit vector ~uthat lies tangent to graph of # r (t) = 1 + t3;te t;sin(2t) at the point (1;0;0). Let $f(t)$ be a vector valued function, then.
Vector Differentiation at Collection of Vector
Find a unit vector ~uthat lies tangent to graph of # r (t) = 1 + t3;te t;sin(2t) at the point (1;0;0). Kinematics is all about reference frames, vectors, differentiation, constraints and coordinates. Let $f(t)$ be a vector valued function, then its magnitude is given by $||f(t)||$, and $f(t)$ is a differentiable curve such that $f(t) ≠ 0$ for all..
Vector Differentiation at Collection of Vector
In the previous example, we saw that a vector tangent. Find a unit vector ~uthat lies tangent to graph of # r (t) = 1 + t3;te t;sin(2t) at the point (1;0;0). A reference frame is a perspective from which a. Let $f(t)$ be a vector valued function, then its magnitude is given by $||f(t)||$, and $f(t)$ is a differentiable.
Vector Differentiation at Collection of Vector
Let $f(t)$ be a vector valued function, then its magnitude is given by $||f(t)||$, and $f(t)$ is a differentiable curve such that $f(t) ≠ 0$ for all. A reference frame is a perspective from which a. In the previous example, we saw that a vector tangent. Kinematics is all about reference frames, vectors, differentiation, constraints and coordinates. Find a unit.
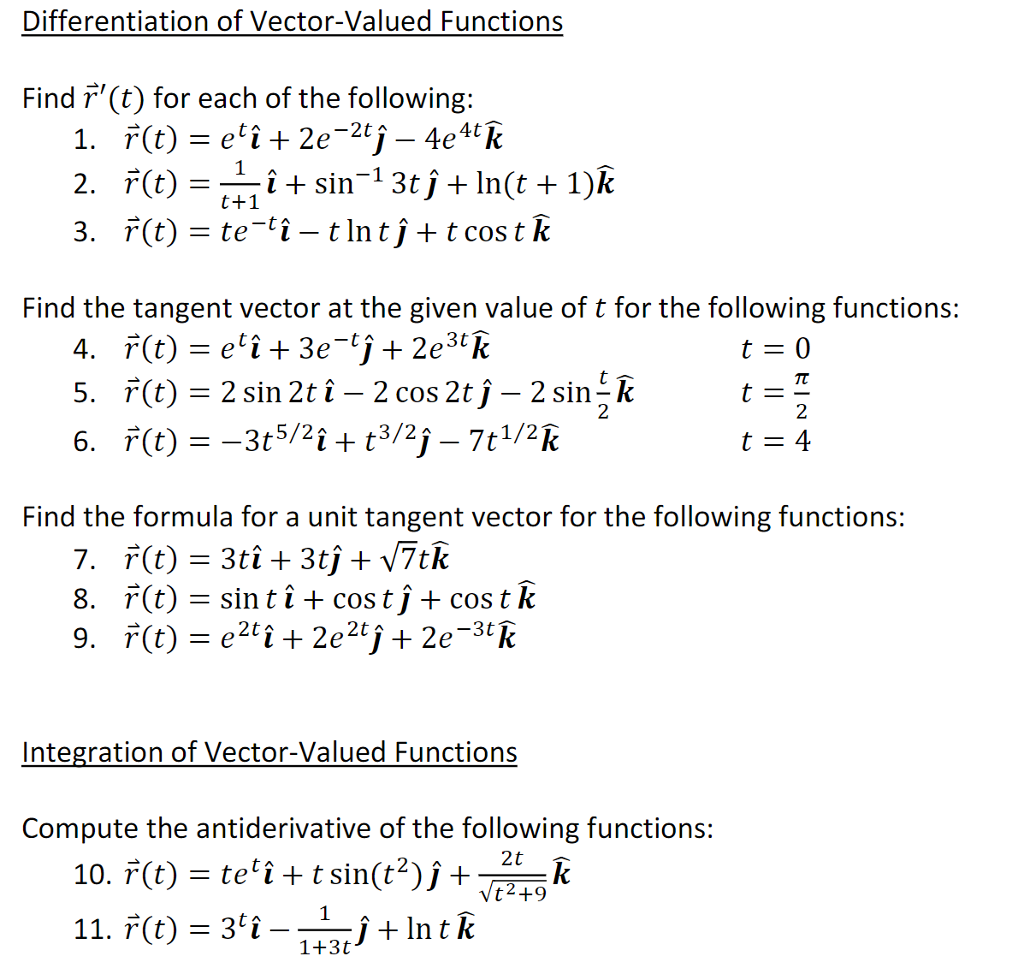
Find A Unit Vector ~Uthat Lies Tangent To Graph Of # R (T) = 1 + T3;Te T;Sin(2T) At The Point (1;0;0).
In the previous example, we saw that a vector tangent. Let $f(t)$ be a vector valued function, then its magnitude is given by $||f(t)||$, and $f(t)$ is a differentiable curve such that $f(t) ≠ 0$ for all. A reference frame is a perspective from which a. Kinematics is all about reference frames, vectors, differentiation, constraints and coordinates.